Caparrucia: índice de la ayuda
Esta página representa el índice de la ayuda del robot Caparrucia
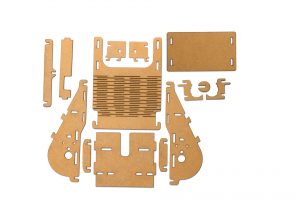
Montaje del robot
Caparrucia está compuesto por diversas piezas de madera y para el montaje no son necesarias herramientas, pulsa en la imagen de las piezas para ver el orden correcto para el ensamblaje del robot. Una vez finalizado el montaje regresa a este índice para continuar
Arduino
Antes de comenzar con la programación veamos qué es Arduino, cómo se instala en el ordenador y cómo se maneja la interfaz.

Ardublock: programación visual
ArduBlock es un entorno de programación diseñado para hacer “la programación física con Arduino tan fácil como arrastrar y soltar” que en lugar de escribir código nos permite realizar la programación visual mediante bloques. Es compatible con todos los sistemas operativos.

Conceptos básicos de programación
El lenguaje de programación que utiliza Arduino tiene sólo ligeras particularidades por lo que se puede decir que utiliza “C” ó “C++” (el lenguaje es denominado sólo por la letra C, y el C++ es una versión más avanzada) aunque para el uso básico que le vamos a dar son similares. En este apartado se verán los conceptos más básicos del lenguaje de programación C y así entender los ejemplos escritos en los siguientes apartados del manual.
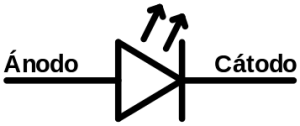
LED RGB
El LED y el LED RGB son los elementos básicos en cualquier proyecto electrónico y son los consideraros el “hola mundo” de la electrónica. Caparrucia tiene un LED RGB el cual está compuesto de 3 LED: rojo , verde y azul .
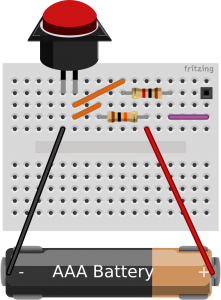
Botón/Pulsador
El pulsador (o botón) es un elemento mecánico que cambia de estado al ser pulsado y a diferencia del interruptor al dejar de ejercer fuerza sobre él regresa al estado inicial. En otras palabras: permanece pulsado sólo en el instante que nosotros tenemos el dedo encima y el resto del tiempo está “apagado”.
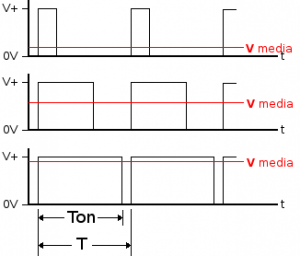
PWM => Velocidad del motor
Para variar la velocidad de los motores se precisa del PWM, que se trata de una modulación hecha por un sistema digital (como lo es el Arduino) para lograr simular señales analógicas como la velocidad de giro del motor.
Sensores: señales analógicas
Los sensores que detectan el suelo y son capaces de saber si están sobre la línea o fuera de ella dan la información al microcontrolador en formato analógico pero los microcontroladores y procesadores sólo trabajan con 1 y 0. Para solucionar ese inconveniente existe los conversores Analógico->Digital, aquí vemos cómo se utilizan.
Otros enlaces de interés:
- Comunicación I²C: Un uso avanzado para el manejo de elementos externos.